Lane Detection using OpenCV
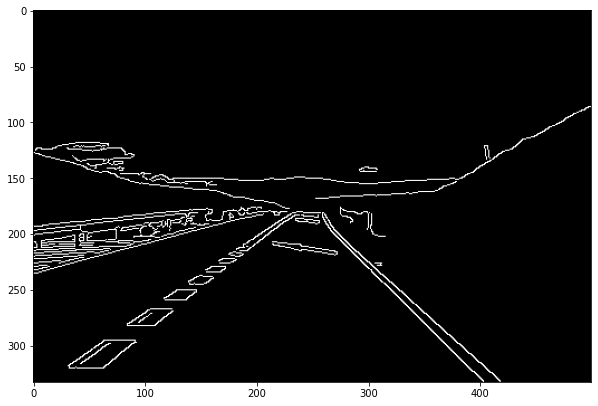
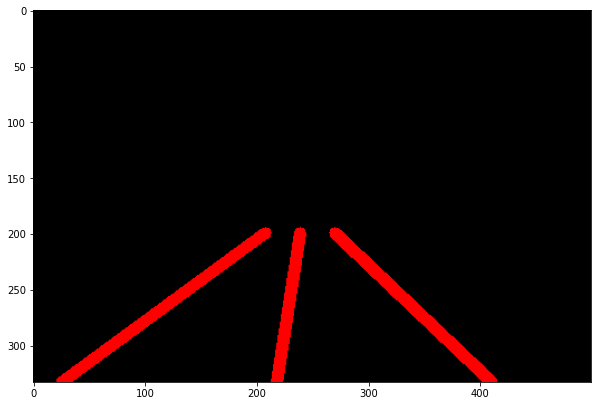
Lane detection is an important computer vision problem in the context of autonomous driving. In this project, an image is taken as an input and then a Gaussian Blur filter is applied to it. A Sobel Filter was implemented to obtain the grayscale gradient image followed by Canny Edge detection using Non-Max Suppression and Hysteresis Thresholding to extract edges between a specified threshold. Image masking is then used to extract only the edges that are of interest (eg: we don’t need the horizon). A probabilistic Hough Transform was then applied to extract the left and right lane markings, which were then overlayed on the original image.